 |
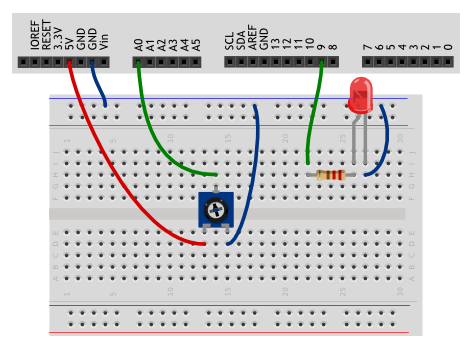
#define LED_PIN 9
#define POT_PIN A0
void setup()
{ pinMode(LED_PIN, OUTPUT);
pinMode(POT_PIN, INPUT);
}
void loop()
{ int rotation;
rotation = analogRead(POT_PIN);
analogWrite(LED_PIN, rotation/4);
}
|
|
#define MOTOR_PIN 9
#define FIRST_BUTTON_PIN 5
#define BUTTON_COUNT 3
#define SPEED_STEP (255 / (BUTTON_COUNT - 1))
void setup()
{
pinMode(MOTOR_PIN, OUTPUT);
for (int i = 0; i < BUTTON_COUNT; ++i)
pinMode(i + FIRST_BUTTON_PIN, INPUT_PULLUP);
}
void loop()
{
for (int i = 0; i < BUTTON_COUNT; ++i)
{
if (digitalRead(i + FIRST_BUTTON_PIN)) continue;
int speed = i * SPEED_STEP;
analogWrite(MOTOR_PIN, speed);
}
} |
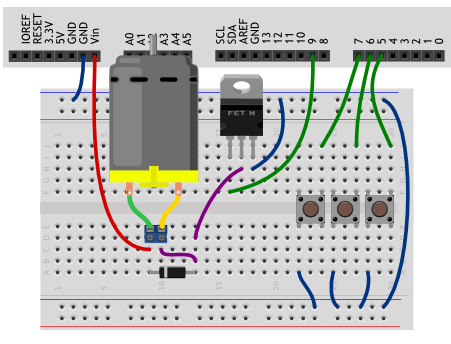 |
#define MOTOR_PIN 9
#define POT_PIN A0
void setup()
{
pinMode(MOTOR_PIN, OUTPUT);
pinMode(POT_PIN, INPUT);
}
void loop()
{ int rotation;
// считываем в rotation напряжение с потенциометра:
// микроконтроллер выдаст число от 0 до 1023
// пропорциональное углу поворота ручки
rotation = analogRead(POT_PIN);
analogWrite(MOTOR_PIN, rotation / 25);
}
|